This class implements randomized CART algorithm used in the tree growing process of candidate trees in Random Forests algorithm. The tree growing process is different from the original CART algorithm because of the input attributes which are considered for each node split. In randomized CART, a few (fixed number) attributes are randomly chosen from all available attributes while deciding the best split. This is unlike the original CART where all available attributes are considered while deciding the best split. More...
#include <MyRandomCARTree.h>
Public Member Functions | |
| CMyRandomCARTree () | |
| virtual | ~CMyRandomCARTree () |
| virtual const char * | get_name () const |
| void | set_feature_subset_size (index_t size) |
| index_t | get_feature_subset_size () const |
| CMyRandomCARTree * | clone () |
 Public Member Functions inherited from shogun::CMyCARTree Public Member Functions inherited from shogun::CMyCARTree | |
| CMyCARTree () | |
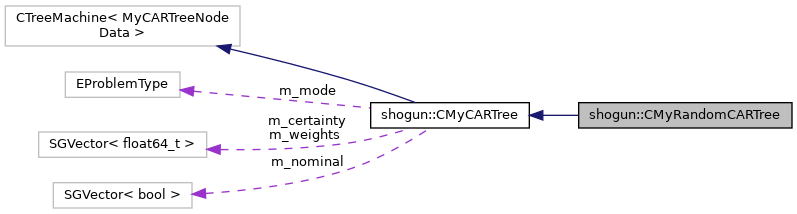
| This class implements the Classification And Regression Trees algorithm by Breiman et al for decision tree learning. A CART tree is a binary decision tree that is constructed by splitting a node into two child nodes repeatedly, beginning with the root node that contains the whole dataset. TREE GROWING PROCESS : During the tree growing process, we recursively split a node into left child and right child so that the resulting nodes are "purest". We do this until any of the stopping criteria is met. To find the best split, we scan through all possible splits in all predictive attributes. The best split is one that maximises some splitting criterion. For classification tasks, ie. when the dependent attribute is categorical, the Gini index is used. For regression tasks, ie. when the dependent variable is continuous, least squares deviation is used. The algorithm uses two stopping criteria : if node becomes completely "pure", ie. all its members have identical dependent variable, or all of them have identical predictive attributes (independent variables). . More... | |
| CMyCARTree (SGVector< bool > attribute_types, EProblemType prob_type=PT_MULTICLASS) | |
| CMyCARTree (SGVector< bool > attribute_types, EProblemType prob_type, int32_t num_folds, bool cv_prune) | |
| virtual | ~CMyCARTree () |
| virtual void | set_labels (CLabels *lab) |
| virtual EProblemType | get_machine_problem_type () const |
| void | set_machine_problem_type (EProblemType mode) |
| virtual bool | is_label_valid (CLabels *lab) const |
| virtual CBinaryLabels * | apply_binary (CFeatures *data=NULL) |
| virtual CMulticlassLabels * | apply_multiclass (CFeatures *data=NULL) |
| virtual CRegressionLabels * | apply_regression (CFeatures *data=NULL) |
| void | prune_using_test_dataset (CDenseFeatures< float64_t > *feats, CLabels *gnd_truth, SGVector< float64_t > weights=SGVector< float64_t >()) |
| void | set_weights (SGVector< float64_t > w) |
| SGVector< float64_t > | get_weights () const |
| void | clear_weights () |
| void | set_feature_types (SGVector< bool > ft) |
| SGVector< bool > | get_feature_types () const |
| void | clear_feature_types () |
| int32_t | get_num_folds () const |
| void | set_num_folds (int32_t folds) |
| int32_t | get_max_depth () const |
| void | set_max_depth (int32_t depth) |
| int32_t | get_min_node_size () const |
| void | set_min_node_size (int32_t nsize) |
| void | set_cv_pruning (bool cv_pruning) |
| float64_t | get_label_epsilon () |
| void | set_label_epsilon (float64_t epsilon) |
| void | pre_sort_features (CFeatures *data, SGMatrix< float64_t > &sorted_feats, SGMatrix< index_t > &sorted_indices) |
| void | set_sorted_features (SGMatrix< float64_t > &sorted_feats, SGMatrix< index_t > &sorted_indices) |
| std::vector< double > | feature_importances () |
| SGVector< float64_t > | get_certainty_vector () const |
| void | set_probabilities (CLabels *labels, CFeatures *data=NULL) |
Protected Member Functions | |
| virtual index_t | compute_best_attribute (const SGMatrix< float64_t > &mat, const SGVector< float64_t > &weights, CDenseLabels *labels, SGVector< float64_t > &left, SGVector< float64_t > &right, SGVector< bool > &is_left_final, index_t &num_missing, index_t &count_left, index_t &count_right, float64_t &IG, index_t subset_size=0, const SGVector< index_t > &active_indices=SGVector< index_t >()) |
| Protected Member Functions inherited from shogun::CMyCARTree | |
| virtual bool | train_machine (CFeatures *data=NULL) |
| virtual CBinaryTreeMachineNode< MyCARTreeNodeData > * | CARTtrain (CFeatures *data, SGVector< float64_t > weights, CLabels *labels, int32_t level) |
| SGVector< float64_t > | get_unique_labels (SGVector< float64_t > labels_vec, int32_t &n_ulabels) |
| virtual int32_t | compute_best_attribute (const SGMatrix< float64_t > &mat, const SGVector< float64_t > &weights, CLabels *labels, SGVector< float64_t > &left, SGVector< float64_t > &right, SGVector< bool > &is_left_final, int32_t &num_missing, int32_t &count_left, int32_t &count_right, float64_t &IG, int32_t subset_size=0, const SGVector< int32_t > &active_indices=SGVector< index_t >()) |
| SGVector< bool > | surrogate_split (SGMatrix< float64_t > data, SGVector< float64_t > weights, SGVector< bool > nm_left, int32_t attr) |
| void | handle_missing_vecs_for_continuous_surrogate (SGMatrix< float64_t > m, CDynamicArray< int32_t > *missing_vecs, CDynamicArray< float64_t > *association_index, CDynamicArray< int32_t > *intersect_vecs, SGVector< bool > is_left, SGVector< float64_t > weights, float64_t p, int32_t attr) |
| void | handle_missing_vecs_for_nominal_surrogate (SGMatrix< float64_t > m, CDynamicArray< int32_t > *missing_vecs, CDynamicArray< float64_t > *association_index, CDynamicArray< int32_t > *intersect_vecs, SGVector< bool > is_left, SGVector< float64_t > weights, float64_t p, int32_t attr) |
| float64_t | gain (SGVector< float64_t > wleft, SGVector< float64_t > wright, SGVector< float64_t > wtotal, SGVector< float64_t > labels) |
| float64_t | gain (const SGVector< float64_t > &wleft, const SGVector< float64_t > &wright, const SGVector< float64_t > &wtotal) |
| float64_t | gini_impurity_index (const SGVector< float64_t > &weighted_lab_classes, float64_t &total_weight) |
| float64_t | least_squares_deviation (const SGVector< float64_t > &labels, const SGVector< float64_t > &weights, float64_t &total_weight) |
| CLabels * | apply_from_current_node (CDenseFeatures< float64_t > *feats, bnode_t *current, bool set_certainty=false) |
| void | prune_by_cross_validation (CDenseFeatures< float64_t > *data, int32_t folds) |
| float64_t | compute_error (CLabels *labels, CLabels *reference, SGVector< float64_t > weights) |
| CDynamicObjectArray * | prune_tree (CTreeMachine< MyCARTreeNodeData > *tree) |
| float64_t | find_weakest_alpha (bnode_t *node) |
| void | cut_weakest_link (bnode_t *node, float64_t alpha) |
| void | form_t1 (bnode_t *node) |
| void | init () |
| void | get_importance (bnode_t *node, vector< double > &importances) |
Private Member Functions | |
| void | init () |
Private Attributes | |
| index_t | m_randsubset_size |
Additional Inherited Members | |
| Static Public Attributes inherited from shogun::CMyCARTree | |
| static const float64_t | MISSING = CMath::MAX_REAL_NUMBER |
| static const float64_t | MIN_SPLIT_GAIN = 1e-7 |
| static const float64_t | EQ_DELTA = 1e-7 |
| Protected Attributes inherited from shogun::CMyCARTree | |
| float64_t | m_label_epsilon |
| SGVector< bool > | m_nominal |
| SGVector< float64_t > | m_weights |
| SGMatrix< float64_t > | m_sorted_features |
| SGMatrix< index_t > | m_sorted_indices |
| bool | m_pre_sort |
| bool | m_types_set |
| bool | m_weights_set |
| bool | m_apply_cv_pruning |
| int32_t | m_folds |
| EProblemType | m_mode |
| CDynamicArray< float64_t > * | m_alphas |
| int32_t | m_max_depth |
| int32_t | m_min_node_size |
| SGVector< float64_t > | m_certainty |
Detailed Description
This class implements randomized CART algorithm used in the tree growing process of candidate trees in Random Forests algorithm. The tree growing process is different from the original CART algorithm because of the input attributes which are considered for each node split. In randomized CART, a few (fixed number) attributes are randomly chosen from all available attributes while deciding the best split. This is unlike the original CART where all available attributes are considered while deciding the best split.
Definition at line 48 of file MyRandomCARTree.h.
Constructor & Destructor Documentation
◆ CMyRandomCARTree()
| CMyRandomCARTree::CMyRandomCARTree | ( | ) |
constructor
Definition at line 36 of file MyRandomCARTree.cc.
◆ ~CMyRandomCARTree()
|
virtual |
destructor
Definition at line 42 of file MyRandomCARTree.cc.
Member Function Documentation
◆ clone()
| CMyRandomCARTree * CMyRandomCARTree::clone | ( | ) |
Definition at line 71 of file MyRandomCARTree.cc.
◆ compute_best_attribute()
|
protectedvirtual |
computes best attribute for CARTtrain
- Parameters
-
mat data matrix weights data weights labels_vec data labels left stores feature values for left transition right stores feature values for right transition is_left_final stores which feature vectors go to the left child num_missing number of missing attributes count_left stores number of feature values for left transition count_right stores number of feature values for right transition
- Returns
- index to the best attribute
Definition at line 52 of file MyRandomCARTree.cc.
◆ get_feature_subset_size()
|
inline |
get number of random features to choose in each node split
- Returns
- size subset size
Definition at line 72 of file MyRandomCARTree.h.
◆ get_name()
|
inlinevirtual |
get name
- Returns
- class name CARTree
Reimplemented from shogun::CMyCARTree.
Definition at line 60 of file MyRandomCARTree.h.
◆ init()
|
private |
initialize parameters
Definition at line 87 of file MyRandomCARTree.cc.
◆ set_feature_subset_size()
| void CMyRandomCARTree::set_feature_subset_size | ( | index_t | size | ) |
set number of random features to choose in each node split
- Parameters
-
size subset size
Definition at line 46 of file MyRandomCARTree.cc.
Member Data Documentation
◆ m_randsubset_size
|
private |
random feature subset size
Definition at line 100 of file MyRandomCARTree.h.
The documentation for this class was generated from the following files: