Holds a search space, consisting of operations and terminals and functions, and methods to sample that space to create programs. More...
#include <search_space.h>

Public Types | |
| using | ArgsHash = std::size_t |
| template<typename T> | |
| using | Map |
Public Member Functions | |
| template<typename PT> | |
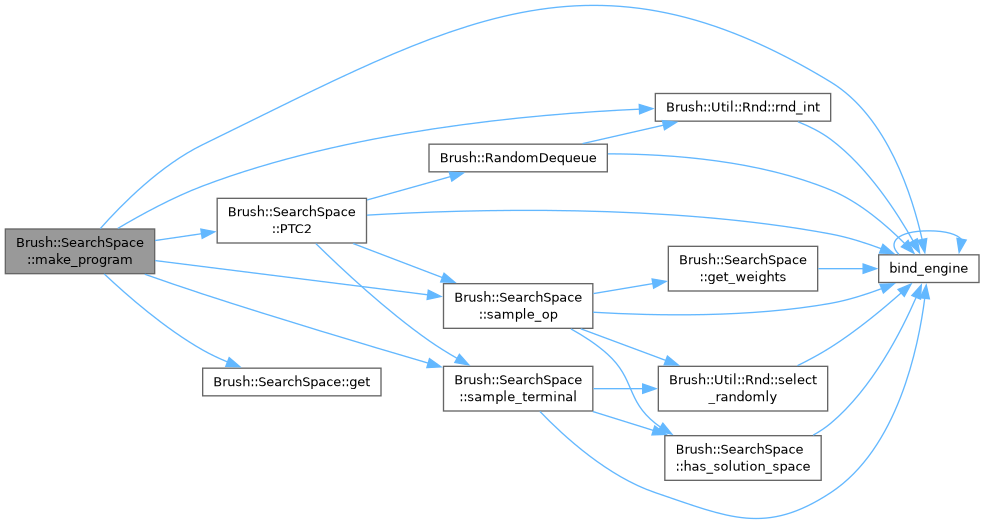
| PT | make_program (const Parameters ¶ms, int max_d=0, int max_size=0) |
| Makes a random program. | |
| RegressorProgram | make_regressor (int max_d=0, int max_size=0, const Parameters ¶ms=Parameters()) |
| Makes a random regressor program. Convenience wrapper for make_program. | |
| ClassifierProgram | make_classifier (int max_d=0, int max_size=0, const Parameters ¶ms=Parameters()) |
| Makes a random classifier program. Convenience wrapper for make_program. | |
| MulticlassClassifierProgram | make_multiclass_classifier (int max_d=0, int max_size=0, const Parameters ¶ms=Parameters()) |
| Makes a random multiclass classifier program. Convenience wrapper for make_program. | |
| RepresenterProgram | make_representer (int max_d=0, int max_size=0, const Parameters ¶ms=Parameters()) |
| Makes a random representer program. Convenience wrapper for make_program. | |
| SearchSpace ()=default | |
| SearchSpace (const Dataset &d, const unordered_map< string, float > &user_ops={}, bool weights_init=true) | |
| Construct a search space. | |
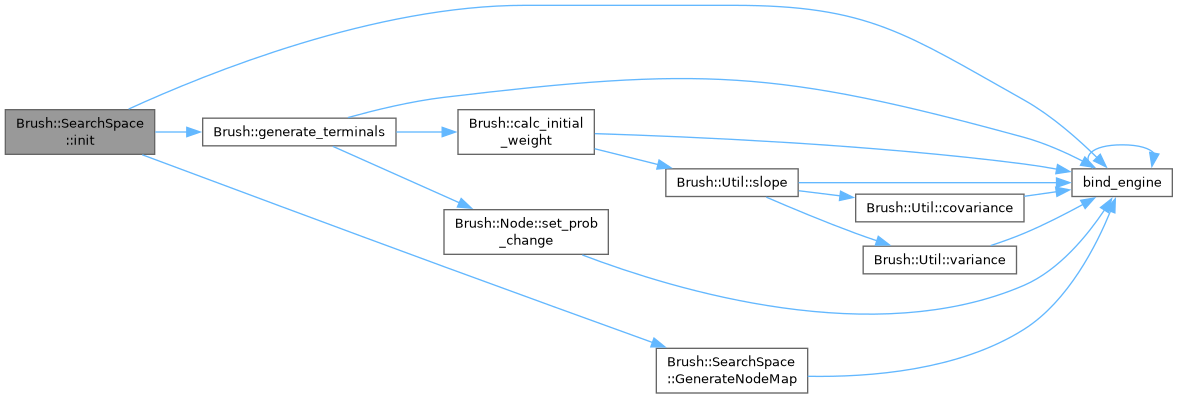
| void | init (const Dataset &d, const unordered_map< string, float > &user_ops={}, bool weights_init=true) |
| Called by the constructor to initialize the search space. | |
| bool | check (DataType R) const |
| check if a return type is in the node map | |
| bool | check (DataType R, size_t sig_hash) const |
| check if a function signature is in the search space | |
| bool | check (DataType R, size_t sig_hash, NodeType type) const |
| check if a typed Node is in the search space | |
| template<typename Iter> | |
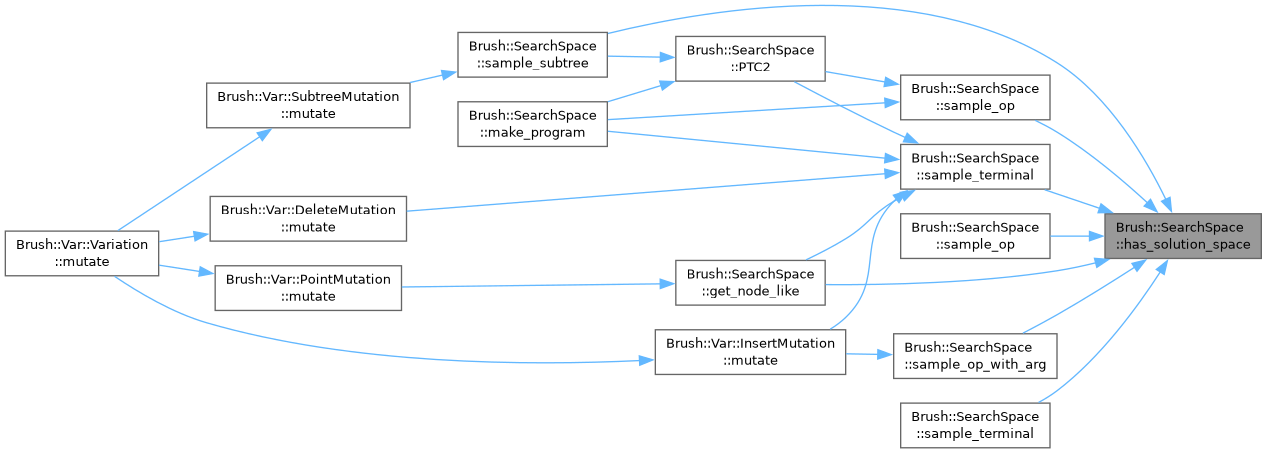
| bool | has_solution_space (Iter start, Iter end) const |
| Takes iterators to weight vectors and checks if they have a non-empty solution space. An empty solution space is defined as having no non-zero, positive values. | |
| Node | get (NodeType type, DataType R, size_t sig_hash) const |
| get a typed node | |
| template<typename S> | |
| Node | get (NodeType type, DataType R, S sig) const |
| get a typed node. | |
| vector< float > | get_weights () const |
| get weights of the return types | |
| vector< float > | get_weights (DataType ret) const |
get weights of the argument types matching return type ret. | |
| vector< float > | get_weights (DataType ret, ArgsHash sig_hash) const |
| get the weights of nodes matching a signature. | |
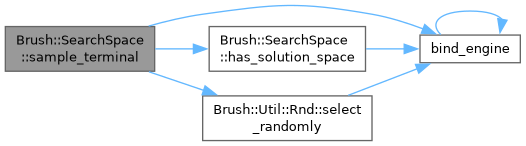
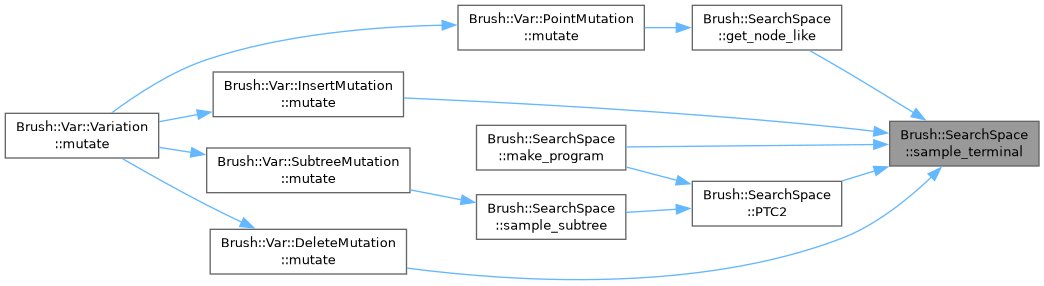
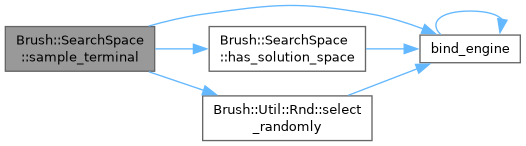
| std::optional< Node > | sample_terminal (bool force_return=false) const |
| Get a random terminal. | |
| std::optional< Node > | sample_terminal (DataType R, bool force_return=false) const |
Get a random terminal with return type R | |
| std::optional< Node > | sample_op (DataType ret) const |
get an operator matching return type ret. | |
| std::optional< Node > | sample_op (NodeType type, DataType R, bool force_return=false) const |
| Get a specific node type that matches a return value. | |
| std::optional< Node > | sample_op_with_arg (DataType ret, DataType arg, bool terminal_compatible=true, int max_args=0) const |
| get operator with at least one argument matching arg | |
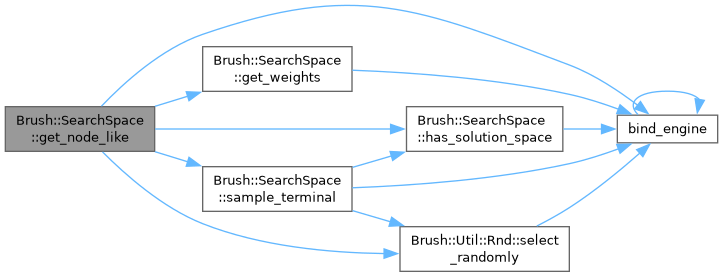
| std::optional< Node > | get_node_like (Node node) const |
get a node with a signature matching node | |
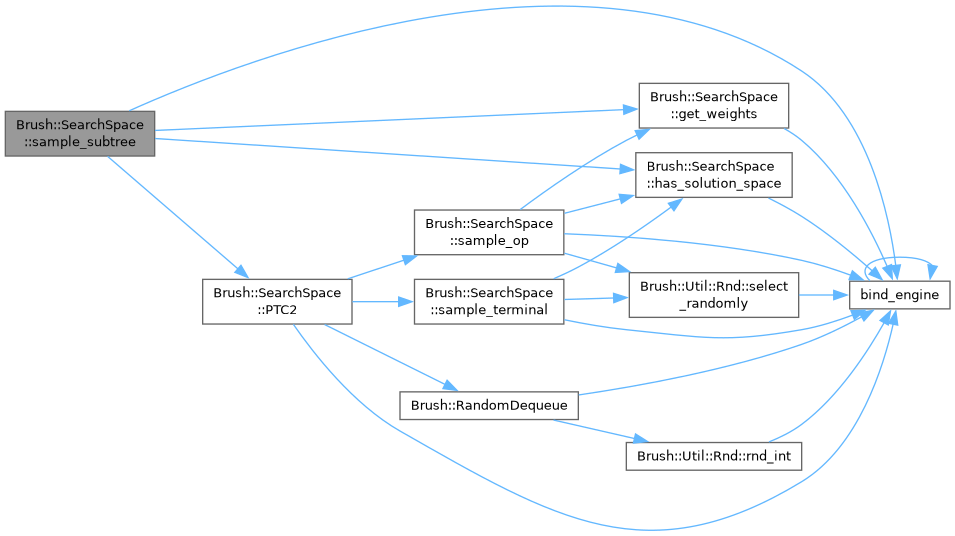
| std::optional< tree< Node > > | sample_subtree (Node root, int max_d, int max_size) const |
create a subtree with maximum size and depth restrictions and root of type root_type | |
| void | print () const |
| prints the search space map. | |
| std::string | repr () const |
| returns a string with a json representation of the search space map | |
| template<typename P> | |
| P | make_program (const Parameters ¶ms, int max_d, int max_size) |
Public Attributes | |
| Map< Node > | node_map |
| Maps return types to argument types to node types. | |
| Map< float > | node_map_weights |
| A map of weights corresponding to elements in node_map, used to weight probabilities of each node being sampled from the map. | |
| unordered_map< DataType, vector< Node > > | terminal_map |
| Maps return types to terminals. | |
| unordered_map< DataType, vector< float > > | terminal_weights |
| A map of weights corresponding to elements in terminal_map, used to weight probabilities of each terminal being sampled from the map. | |
| vector< DataType > | terminal_types |
| A vector storing the available return types of terminals. | |
| vector< string > | op_names |
| A vector storing the available operator names (used by bandits). | |
Private Member Functions | |
| tree< Node > & | PTC2 (tree< Node > &Tree, tree< Node >::iterator root, int max_d, int max_size, bool start_from_decision_trees) const |
| template<NodeType NT, typename S> | |
| constexpr void | AddNode (const unordered_map< string, float > &user_ops, const vector< DataType > &unique_data_types) |
| template<NodeType NT, typename Sigs, std::size_t... Is> | |
| constexpr void | AddNodes (const unordered_map< string, float > &user_ops, const vector< DataType > &unique_data_types, std::index_sequence< Is... >) |
| template<NodeType NT> | |
| void | MakeNodes (const unordered_map< string, float > &user_ops, const vector< DataType > &unique_data_types) |
| template<std::size_t... Is> | |
| void | GenerateNodeMap (const unordered_map< string, float > &user_ops, const vector< DataType > &unique_data_types, std::index_sequence< Is... >) |
Static Private Member Functions | |
| template<NodeType NT, typename S> requires (!is_in_v<NT, NodeType::Terminal, NodeType::Constant, NodeType::MeanLabel>) | |
| static constexpr std::optional< Node > | CreateNode (const auto &unique_data_types, bool use_all, bool weighted) |
Detailed Description
Holds a search space, consisting of operations and terminals and functions, and methods to sample that space to create programs.
The set of operators is a user controlled parameter; however, we can automate, to some extent, the set of possible operators based on the data types in the problem. Constraints on operators based on data types:
- only user specified operators are included.
- operators whose arguments are covered by terminal types are included first. Then, a second pass includes any operators whose arguments are covered by terminal_types + return types of the current set of operators. One could imagine this continuing ad infinitum, but we just do two passes for simplicity.
- assertion check to make sure there is at least one operator that returns the output type of the model.
When sampling in the search space (using any of the sampling functions sample_op or sample_terminal), some methods can fail to return a value — given a specific set of parameters to a function, the candidate solutions set may be empty — and, for these methods, the return type is either a valid value, or a std::nullopt. This is controlled wrapping the return type with std::optional.
Parameters
Definition at line 83 of file search_space.h.
Member Typedef Documentation
◆ ArgsHash
| using Brush::SearchSpace::ArgsHash = std::size_t |
Definition at line 85 of file search_space.h.
◆ Map
| using Brush::SearchSpace::Map |
Definition at line 88 of file search_space.h.
Constructor & Destructor Documentation
◆ SearchSpace() [1/2]
|
default |
◆ SearchSpace() [2/2]
|
inline |
Construct a search space.
- Parameters
-
d A dataset containing terminal definitions user_ops Optional user-provided dictionary of operators with their probability of being chosen weights_init whether the terminal prob_change should be estimated from correlations with the target value
Definition at line 187 of file search_space.h.
Member Function Documentation
◆ AddNode()
|
inlineconstexprprivate |
Definition at line 642 of file search_space.h.

◆ AddNodes()
|
inlineconstexprprivate |
Definition at line 666 of file search_space.h.

◆ check() [1/3]
|
inline |
check if a return type is in the node map
- Parameters
-
R data type
- Returns
- true if it exists
Definition at line 200 of file search_space.h.
◆ check() [2/3]
|
inline |
check if a function signature is in the search space
- Parameters
-
R return type sig_hash signature hash
- Returns
- true if it exists
Definition at line 212 of file search_space.h.

◆ check() [3/3]
check if a typed Node is in the search space
- Parameters
-
R return type sig_hash signature hash type the node type
- Returns
- true if it exists
Definition at line 228 of file search_space.h.

◆ CreateNode()
requires (!is_in_v<NT, NodeType::Terminal, NodeType::Constant, NodeType::MeanLabel>)
|
inlinestaticconstexprprivate |
Definition at line 624 of file search_space.h.


◆ GenerateNodeMap()
|
inlineprivate |
Definition at line 698 of file search_space.h.

◆ get() [1/2]
get a typed node.
- Template Parameters
-
S the signature of the node, inferred.
- Parameters
-
type the node type R the return type of the node sig the signature of the node
- Returns
- the matching Node
Definition at line 269 of file search_space.h.


◆ get() [2/2]
get a typed node
- Parameters
-
type the node type R the return type of the node sig_hash the signature hash of the node
- Returns
- the matching Node
Definition at line 256 of file search_space.h.

◆ get_node_like()
get a node with a signature matching node
- Parameters
-
node the node to match
- Returns
std::optionalthat may contain a Node
Definition at line 565 of file search_space.h.
◆ get_weights() [1/3]
|
inline |
get weights of the return types
- Returns
- a weight vector, each element corresponding to a return type.
Definition at line 273 of file search_space.h.

◆ get_weights() [2/3]
get weights of the argument types matching return type ret.
- Parameters
-
ret return type
- Returns
- a weight vector, each element corresponding to an args type.
Definition at line 293 of file search_space.h.
◆ get_weights() [3/3]
get the weights of nodes matching a signature.
- Parameters
-
ret return type sig_hash signature hash
- Returns
- a weight vector, each element corresponding to a node.
Definition at line 312 of file search_space.h.
◆ has_solution_space()
|
inline |
Takes iterators to weight vectors and checks if they have a non-empty solution space. An empty solution space is defined as having no non-zero, positive values.
- Template Parameters
-
T type of iterator.
- Parameters
-
start Start iterator end End iterator
- Returns
- true if at least one weight is positive
Definition at line 247 of file search_space.h.
◆ init()
| void Brush::SearchSpace::init | ( | const Dataset & | d, |
| const unordered_map< string, float > & | user_ops = {}, | ||
| bool | weights_init = true ) |
Called by the constructor to initialize the search space.
- Parameters
-
d A dataset containing terminal definitions user_ops Optional user-provided dictionary of operators with their probability of being chosen weights_init whether the terminal prob_change should be estimated from correlations with the target value
Definition at line 179 of file search_space.cpp.
◆ make_classifier()
| ClassifierProgram Brush::SearchSpace::make_classifier | ( | int | max_d = 0, |
| int | max_size = 0, | ||
| const Parameters & | params = Parameters() ) |
Makes a random classifier program. Convenience wrapper for make_program.
- Parameters
-
max_d max depth of the program max_size max size of the program
- Returns
- a classifier program
Definition at line 473 of file search_space.cpp.

◆ make_multiclass_classifier()
| MulticlassClassifierProgram Brush::SearchSpace::make_multiclass_classifier | ( | int | max_d = 0, |
| int | max_size = 0, | ||
| const Parameters & | params = Parameters() ) |
Makes a random multiclass classifier program. Convenience wrapper for make_program.
- Parameters
-
max_d max depth of the program max_size max size of the program
- Returns
- a multiclass classifier program
Definition at line 478 of file search_space.cpp.


◆ make_program() [1/2]
| P Brush::SearchSpace::make_program | ( | const Parameters & | params, |
| int | max_d, | ||
| int | max_size ) |
◆ make_program() [2/2]
| PT Brush::SearchSpace::make_program | ( | const Parameters & | params, |
| int | max_d = 0, | ||
| int | max_size = 0 ) |
Makes a random program.
We use an implementation of PTC2 for strongly typed GP from
Sean Luke. "Two fast tree-creation algorithms for genetic programming" (https://doi.org/10.1109/4235.873237)
- Template Parameters
-
PT program type
- Parameters
-
max_d max depth of the program max_size max size of the programd
- Returns
- a program of type PTsize

◆ make_regressor()
| RegressorProgram Brush::SearchSpace::make_regressor | ( | int | max_d = 0, |
| int | max_size = 0, | ||
| const Parameters & | params = Parameters() ) |
Makes a random regressor program. Convenience wrapper for make_program.
- Parameters
-
max_d max depth of the program max_size max size of the program
- Returns
- a regressor program
Definition at line 468 of file search_space.cpp.

◆ make_representer()
| RepresenterProgram Brush::SearchSpace::make_representer | ( | int | max_d = 0, |
| int | max_size = 0, | ||
| const Parameters & | params = Parameters() ) |
Makes a random representer program. Convenience wrapper for make_program.
- Parameters
-
max_d max depth of the program max_size max size of the program
- Returns
- a representer program
Definition at line 484 of file search_space.cpp.

◆ MakeNodes()
|
inlineprivate |
Definition at line 674 of file search_space.h.

◆ print()
| void Brush::SearchSpace::print | ( | ) | const |
prints the search space map.
Definition at line 175 of file search_space.cpp.

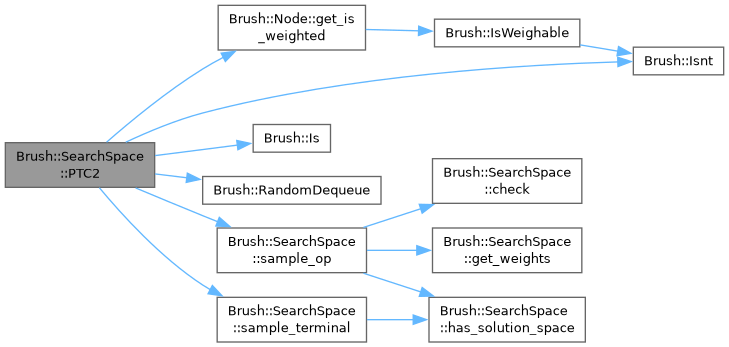
◆ PTC2()
|
private |
Definition at line 312 of file search_space.cpp.

◆ repr()
|
inline |
returns a string with a json representation of the search space map
Definition at line 597 of file search_space.h.

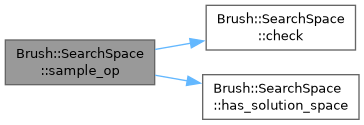
◆ sample_op() [1/2]
get an operator matching return type ret.
- Parameters
-
ret return type
- Returns
std::optionalthat may contain a randomly chosen operator matching return typeret
Definition at line 427 of file search_space.h.
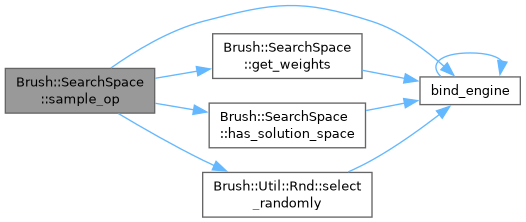

◆ sample_op() [2/2]
|
inline |
Get a specific node type that matches a return value.
- Parameters
-
type the node type R the return type
- Returns
std::optionalthat may contain a Node of typetypewith return typeR.
Definition at line 461 of file search_space.h.
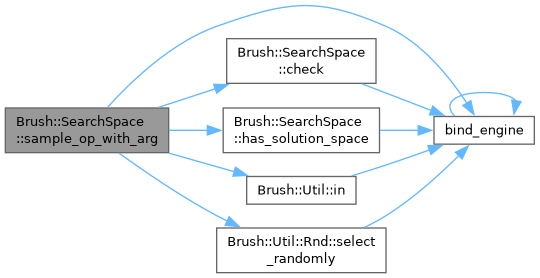
◆ sample_op_with_arg()
|
inline |
get operator with at least one argument matching arg
- Parameters
-
ret return type arg argument type to match terminal_compatible if true, the other args the returned operator takes must exist in the terminal types. max_args if zero, there is no limit on number of arguments of the operator. If not, the operator can have at most max_argsarguments.
- Returns
std::optionalthat may contain a matching operator respecting all restrictions.
Definition at line 503 of file search_space.h.
◆ sample_subtree()
| std::optional< tree< Node > > Brush::SearchSpace::sample_subtree | ( | Node | root, |
| int | max_d, | ||
| int | max_size ) const |
create a subtree with maximum size and depth restrictions and root of type root_type
- Parameters
-
root_type return type max_d the maximum depth max_size the maximum size of the tree (will be sampled between [1, max_size])
- Returns
std::optionalthat may contain a tree
Definition at line 282 of file search_space.cpp.

◆ sample_terminal() [1/2]
|
inline |
Get a random terminal.
- Returns
std::optionalthat may contain a terminal Node.
Definition at line 323 of file search_space.h.
◆ sample_terminal() [2/2]
|
inline |
Get a random terminal with return type R
- Returns
std::optionalthat may contain a terminal Node of typeR.
Definition at line 384 of file search_space.h.
Member Data Documentation
◆ node_map
Maps return types to argument types to node types.
schema:
{ return_type : { arguments_type : {node_type : node } }}
Definition at line 100 of file search_space.h.
◆ node_map_weights
| Map<float> Brush::SearchSpace::node_map_weights |
A map of weights corresponding to elements in node_map, used to weight probabilities of each node being sampled from the map.
Definition at line 103 of file search_space.h.
◆ op_names
A vector storing the available operator names (used by bandits).
Definition at line 124 of file search_space.h.
◆ terminal_map
Maps return types to terminals.
schema:
{ return_type : vector of Nodes }
Definition at line 115 of file search_space.h.
◆ terminal_types
A vector storing the available return types of terminals.
Definition at line 121 of file search_space.h.
◆ terminal_weights
A map of weights corresponding to elements in terminal_map, used to weight probabilities of each terminal being sampled from the map.
Definition at line 118 of file search_space.h.
The documentation for this struct was generated from the following files: